

This project is currently out of stock.
Description:
Water Spy A Submarine Robot is a specially designed Robot for under water operation. As its main aim is to work underwater so main objective should be that it should be capable of moving in any direction so we had provided it with such a driving power that it can move deep beneath water. To provide driving power six motors have been used. Also for surveillance robot that it should have capability of vision we are using a black and white CCD camera.
The robot is controlled by remote control. Wireless control of robot is achieved using DTMF code signals.
Microcontroller AT 89C51 has been used to control the direction of robot. H-bridge motor driver circuit has been used to provide reversible drive to the dc motors. Main body of Robot is made up of PVC pipes.
Project Photographs:



You will get the following documents with this project:
- Project Report in pdf format and in doc (word) format
- Circuit diagram
- PCB layout
- Microcontroller program in assembly language
- Hex file of the microcontroller code
- Datasheets of all the components / ICs used in the project
Introduction of Water Spy A Submarine Robot project:
The project entitled “Water Spy- A Submarine Robot” is a robot that works underwater. Conventionally we see many robots which work on ground but we thought to accept the challenge to make robots that could be operated beneath water.
Major challenge encountered to is to balance the body of robot underwater. Firstly we had to select motors which could operate beneath water. So critical circuit should be isolated from water. Some of the function which we had successfully implemented on robot that it can travel up, down, forward, backward, left, right beneath water.
Two water tanks required to keep robot beneath water which force it to float and three air tanks are required to stabilize moment of robot under water. Robot is equipped with six DC motors which provide motion to robot in different directions. Also we can add CCD camera to see underneath water world.
Control of driving motor is done through H-bridge motor drives which can easily controls the motors for direction as well as start/stop function. Control signals provided to robot are through wireless remote implemented using FM with DTMF. In all seven function tags are provided on remote control which control total movement of robot.
Main problem encountered is to provide power to motor circuit. Batteries required are too heavy so power is supplied through cable. This problem could be further overcome by using light weight Ni-Cd batteries.
Block Diagram:
Description in detail:
Different Modules in this project are:
A. DTMF TRANSMITTER.
B. DTMF RECEIVER.
C. CONTROL CIRCUIT.
D. MOTOR DRIVER CIRCUIT.
E. MAIN BODY.
F. POWER SUPPLY.
A] DTMF TRANSMITTER
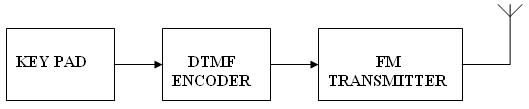
A.1] DTMF ENCODER:
The code generator part employs a keyboard, IC UM 91215B and few other components. The IC UM 91215B is a ‘DUAL TONE MULTI FREQUENCY’ i.e. DTMF generator. Whenever a no. on the keyboard is pressed corresponding multiplexed frequency consisting of a lower band frequency and an upper band frequency is generated.
A.2] FM TRANSMITTER:
The DTMF code signals from UM 91215B is then frequency modulated and transmitted in air using FM transmitter. The carrier frequency is determined by coil L1 and trimmer capacitor C1 (they can be adjusted to change the frequency of the transmission). An antenna of 10 to 15cm length is used for satisfactory range. The antenna is necessary because the transmitter unit has to be housed in metallic cabinet to protect the frequency drift caused due to stray EM
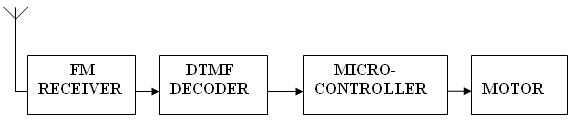
B] DTMF RECEIVER
DTMF RECEIVER
The DTMF code signals from UM 91215B are frequency modulated and transmitted in air using FM transmitter. The antenna connected to FM receiver receives FM signals from remote control and demodulates them. Output of FM receiver is replica of the DTMF coded signal given to FM transmitter section. These DTMF coded signals are given to MT 8870 DTMF decoder. IC MT 8870 decodes the DTMF signals and gives 4 bit BCD output.
C] CONTROL CIRCUIT:
BCD output of DTMF receiver is then given to AT 89C51 Microcontroller. Depending on the BCD code at the output of receiver the software program inside the microcontroller controls the direction and selection of the motors on main body.
D] MOTOR DRIVER CIRCUIT:
In the design of the motor driver circuit we had considered the following points:
- The required direction of rotation.
- The current and voltage requirement.
- The interfacing with the logic circuit.
- Quick Switching.
Considering all these requirements we choose H-bridge motor driver for providing reversible drive to the motors. This circuit consumes very less power in stand still condition and provides the armature current of 3A (our requirement is 200mA).Here opposite pairs of transistors are triggered to generate the required polarity of voltage as per the required direction of motor.
E] MAIN BODY:
Main body consists of water filled tank, air filled tank, stabilization tank & motor with fans attached to it. Air filled and water filled tanks are made up of PVC pipes. Stabilization tank is used for balancing of main body beneath water while the rotating fans provide motion to the body.
F] POWER SUPPLY:
- 9v Ni-Cd battery: This battery is used as a supply for transmitter circuit.
- 5v supply: 5v supply is used to provide power to the control circuit.
- 2v supply: 12v supply is used to provide power to the motor driver circuit.
Hardware Description and Working:
Water Spy Submarine Robot is specially designed for under water applications. Wireless control is provided to the robot using the concept of DTMF.IC 91215B is a DTMF generator, when a key on keypad is pressed it generates a particular DTMF code. These DTMF code single is then frequency modulated using FM transmitter. Antenna radiates this FM signal in to its surrounding.
At receiver section FM receiver is tuned to receive the transmitted signals. It then demodulates the received signal and its output is replica of transmitted DTMF code. This DTMF code signal is given as input to the IC 8870 DTMF decoder. It decodes the DTMF code signal and gives 4-bit BCD code at its output pins. Decoder generates a unique BCD code for each key pressed on the keypad. This BCD output is connected to the input port of AT89C51 microcontroller. Based on this BCD code microcontroller generates control signals using software program inside it, which controls selection and direction of the motors.
Output of microcontroller is given to the H-bridge motor driver circuit which provides reversible drive to the motors used. Thus implementing all, we could operate the robot successfully underwater.
Applications of Water Spy A Submarine Robot:
- An ultrasonically controlled robot submarine for pipe inspection. A model submarine with four legs and umbilical is described that is both radio and ultrasonically controlled to walk in pipe. The ultrasonic communication system is described together with the problem and solutions encountered and worked out. Finally, the leg kinematics, and their actuation system and control are discussed.
- Autonomous Underwater Vehicles Autonomous underwater vehicles are an exciting topic for two reasons. First, there are many interesting real-world applications for such systems. Effective autonomous underwater vehicles would allow or facilitate exploration, salvage, search and rescue, and scientific studies in deep ocean areas. Second, the highly dynamic and noisy nature of the underwater environment makes the problem a difficult one. Combined with the noise and dynamics of the environment are the additional problems of a possible lack of reference points and limited communications due to the water itself.
- Autosub A robot submarine expedition under the Antarctic sea ice has discovered a major food reserve in the Southern Ocean. The findings show a dense band of the, took the revolutionary £5 million Autosub, one of the most advanced underwater probes ever.
Advantages:
- Underwater movement in all possible directions i.e. right, left, forward, reverse, Up, and down.
- If the camera is attached can view the underwater circumstances.
- Least cost.
- The movement of the robot is remotely controlled.
- It could remain beneath the water for a long time which is difficult for a human being.
Future Development:
- We can add waterproof cameras to see deep underneath the world.
- This camera can be powered by focusing light to light on dark surfaces.
- The receiver and Driver circuit can be made compact and mounted on the main body itself and can be powered using a battery supply.
- The sensor could be mounted onto the body to study the properties of water
Video of the project: Water Spy A Submarine Robot
Youtube video coming soon
